

There’s a really nice miniature gearhead motor being sold by BGMicro (MOT1058), Electronic Goldmine (G16279), and All Electronics (DCM-288). It’s a Faulhaber 1524E006S123 motor with 15/5S141:1K832 gearhead and HES164A encoder. (Some of the motors are labeled Micro Mo or Minimotor SA, but they’re the same item.)
BGMicro also has somewhat similar motors that are slightly wider (16 mm instead of 15 mm), 12V (instead of 6V), without the right-angle attachment. Part #MOT1061

Faulhaber gearmotor with encoder and 90-degree drive box.
The motor, gearhead, and encoder have a 16 mm diameter (about 5/8 inches) and a combined length of 57.65 mm (2.27 inches) not counting the 4 mm long shaft (0.1575 inches). The right angle drive assembly width is 30 mm x 31.86 mm (1.183 inches x 1.26 inches) and the length is 16.5 mm (0.65 inch).
The total length is about 72 mm (2.83 inches). The total mass is approximately 55 grams (1.94 ounces).

Gearmotor and right-angle parts.
A motor with a gearbox, encoder, and a right-angle output is an amazing deal at $8 to $12. Because few motors come with a right-angle drive, it might be best to leave the drive assembly in place. However, if that’s not needed for your project, the disassembled parts are worth keeping as they include two crown gears, two ball bearings, some M2 screws, and a 3 mm shaft with a flanged end.
The motor is 1524E006S123 (Electronic Goldmine has a typo saying it is “1524E0065123”):
The windings have an 11 ohm resistance, which means it will draw 0.55 amps @ 6V if stalled. The motor has a peak efficiency of 74%. The no-load motor speed is 13,400 RPM @ 6V -- but will be slower with a gearhead attached.
The gearbox is 15/5S141:1K832 (BGMicro and All Electronics have typos saying it ends in “KB32”):
This is a spur gearhead. It is 66% efficient and the direction of rotation is reversible. There are pre-loaded ball bearings on the output shaft.

Gearhead with right-angle assembly removed.
The gearhead has two M2 (2 mm) screw holes. The gearhead also has two 2-56 UNC screw holes surrounded by a thin circle to differentiate them. (It is thoughtful of the manufacturer to include both metric and imperial threaded holes on the gearhead.) The screw holes are 3 mm (0.118 inches) deep.
The screw holes are positioned along a 10.92 mm (0.43 inch) diameter circle that is centered with respect to the output shaft. Put another way, each screw hole is 10.92/2 = 5.46 mm from the shaft.
Be warned, the 3 mm diameter output shaft on this special gearhead is pretty short -- only 4 mm long. That makes it difficult to attach a coupler or wheel. The right-angle drive box has an output shaft that is twice as long.
The right-angle gear box connects to the motor gearhead with a pair of 2 mm diameter by 4 mm long screws.

Right-angle drive assembly.
The right-angle gear box redirects the motor output 90 degrees. Two motors can be placed side by side on a small robot and have the wheels line up.
The right-angle gear box is surprisingly well made. It contains two crown gears, two ball bearings, and a 3 mm diameter shaft. The plastic frame is fairly stiff -- it’s definitely not cheap polyethylene.
If you want to take it apart or if you simply want to remove the aluminum splined output gear, then you'll need to unscrew the setscrew(s) with the proper size hex key. Since this motor is Swiss or German, I guessed the hex key size would be metric.
I ordered individual 1.3 mm, 0.9mm, and 0.7 mm hex keys. The 0.9 mm hex key almost seemed to work. Unfortunately, when I applied force the key slipped and stripped the screw head.

Melting wax on a stove to get an impression of the setscrew hex key size.
I had an ingenious idea to make a wax impression of the hex key hole so that I could measure the exact key size. I melted wax in a smaller container in a pot of water (to prevent the wax from burning or heating unevenly). Pouring wax on the motor was a bit of a mess.
After letting the wax cool, I pulled it out. The wax barely entered the key hole. The small width and the lack of a way for the air to escape meant that the wax basically sat of the surface of the key hole. This technique didn’t work at all.
In the meantime, I received a 1 mm hex key from a special order. That was too big.
So, I re-examined the 0.9 mm hex key. It actually measured about 0.87 mm. They probably use the same hex key for 0.035 inch hex keys. I guess they figure that’s “close enough”.
I ordered a metric set of hex keys, figuring that would come with a real 0.9 mm hex key. It didn’t. But, it was just a bit thicker in one direction (poorly made?) to grab well enough to unscrew the setscrews.
Perhaps there is a way to coat a sub-0.9mm hex key to grow the dimensions just enough for a better grip. Loctite? Dried super glue? Nail polish?
I recently received an email suggesting that metric hex keys from Brighton Best work well. Thanks Stan!
The encoder is HES164A:
Although I couldn’t find the datasheet for the HES encoder, it is likely similar to the HEM encoder. The HEM encoder accepts 4.5V to 15V, but I'll just use 5V.
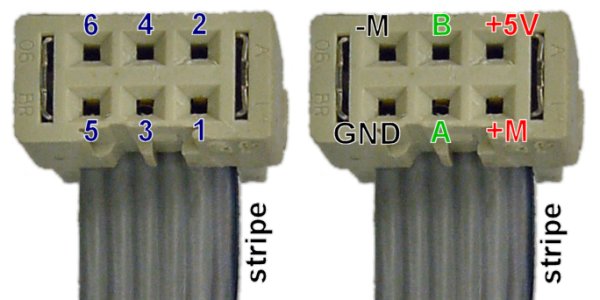
Left: Pinout of the Faulhaber gearmotor encoder. Right: Example pinout to drive the motor forward.
The encoder is connected via a 6 wire ribbon cable to a 2x3 0.1-inch spaced female-socket connecter. The pinout is:
Important Note: This motor can be driven forward, reverse, brake, or coast. So, the voltage applied to motor positive and motor negative pins can be the same or swapped. (Thanks Frank.)
If you want to double check your motor, here is a method to determine the pinout:

Oscilloscope trace of the gearmotor two-channel encoder output. The edges are clean and sharp. Zooming in shows the rise time.
To test the encoder and motor, connect 5V to pins 1 and 2. Connect GND to pins 5 and 6. Channels A and B (pins 3 and 4) output digital square waves in the standard quadrature (2-bit graycode) format as shown in the above image. External pull-up resistors are not required because they are built into the encoder. However, you could add additional 10 kilohm pull-up resistors if you need a faster rise time.
To measure only RPM or distance, a microcontroller need only count the pulses on a single channel. There will be 1 high pulse per revolution of the motor. There will be 141 high pulses per revolution of the gearshaft, or about 2.55 degrees of final output rotation per pulse.
The output of the encoder is very clean. However, to avoid errors due to glitches or to measure rotation direction, the microcontroller can watch both channels A and B.
The motor was tested with the right-angle gear box attached using a bench variable power supply. A multimeter verified the output voltage of the bench power supply. Another multimeter measured the current drawn by the motor. My homemade non-contact tachometer measured the RPM. The encoder was not supplied power during testing.

Graph of RPM and current versus voltage for the Faulhaber gearmotor.
The horizontal axis shows voltage from 2V to 12V. The blue line and left vertical axis shows RPM. The red line and right vertical axis shows current in milliamps (mA).
For example, at 6V the motor RPM is just over 80 RPM and the current is just over 20 mA.
Something weird started happening to the current after 10V. I’m not sure if the lubricant started heating up (losing viscosity), if the motor started overheating, or if something went wrong with the measurements. After letting the motor cool down, I retested the lower voltages and obtained the same readings as before. So, I suspect the motor was being overdriven above 10V.
These motors would be excellent for mini-sumo robots or line-maze solving. The output speed is a little slow, but you can use larger diameter wheels to compensate.
The Faulhaber motors are really a great deal. It is rare to find a precision, lightweight, low-power, right-angle, gearmotor with encoder for such a low price. Get some while you can.