

Carefree is a homemade robot that roams the indoors and the outdoors, with a variety of sensors to detect and avoid obstacles. This robot is featured in chapter 18 of Intermediate Robot Building, specifically to compare the effectiveness of the obstacle avoidance sensors:
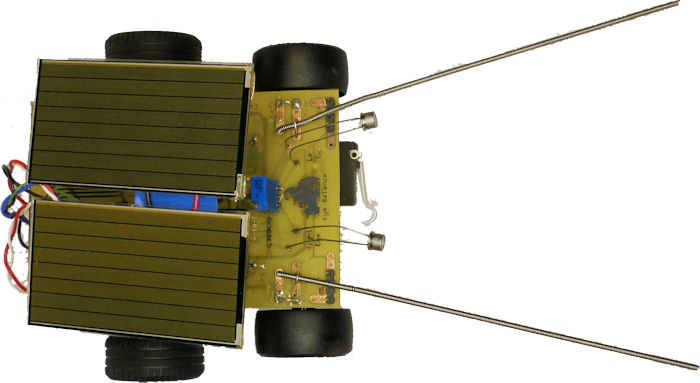
Carefree solar roaming robot.
The robot has a pair of solar panels, with the ability to hide a three pack of AA batteries underneath. On a sunny day, the solar panels are adequate to fully power the robot.
The robot uses rear wheel drive with slick hard-plastic front wheels to permit rotation without binding.
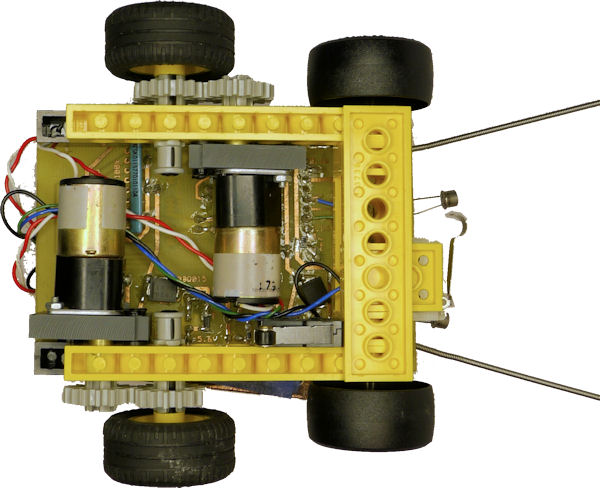
Drivetrain and motor mounts.
Lego gears are used in an idle (1:1) ratio to permit the motors to be mounted side by side. Full details on the motors, motor mounts, and wheel couplers can be found in chapter 18.
An unusual aspect of this robot is the serial motor driver.
Carefree is based on a 14-pin 68HC908KX8 microcontroller chip. There weren’t enough pins to support both the wide-variety of sensors as well as the standard direct connection to the motor driver MOSFETs. So, the state of each transistor is pumped into a 74HC595 serial chip a bit a time. When all eight bits have been input, a latch pin tells the 74HC595 to output the values in parallel to set the state of both motors.
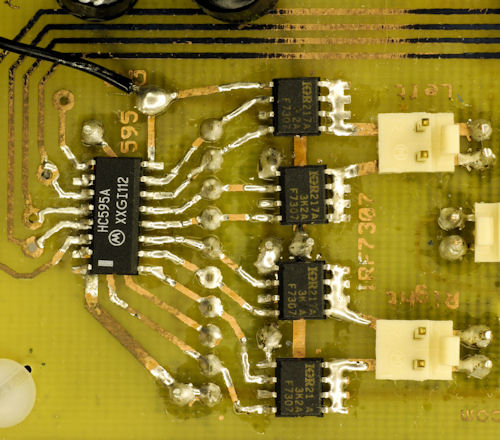
74HC595 serial to parallel motor driver.
PWM speed-controlled robots or very fast robots that switch motor states often would be constrained by the overhead of having to output an entire byte serially rather than controlling MOSFETs individually. But, most robots are physically slow compared to the processor speed, and thus can benefit from the tradeoff of output speed vs number of pins used.
The transistors that supply power to the motors are International Rectifier IRF7307 HEXFET power MOSFETs. They combine both an N-channel and P-channel transistor into a single package. Since MOSFETs have a built-in body diode, and the motors are fairly low power, no additional components are necessary to implement an H-bridge.
Note: On the top of the picture above, the dark areas on the four traces are laser toner mask that protected the copper during etching. Since nothing is soldered directly on top of the traces, there was no reason to fully clean off the toner.
Every printed page of a book or magazine costs money to reproduce. Therefore, a technology publisher doesn’t want to devote space to an author’s favorite recipes or pictures of their children, regardless of whether they are adorable or not. But, that doesn’t stop a creative mind doing something sneaky...
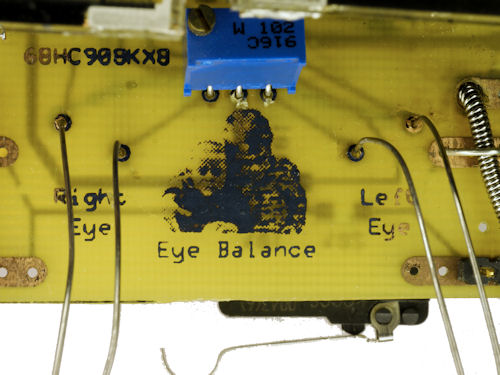
Secret bitmap image on PCB.
One of my favorite photographs is of my older son hugging his less-than-a-year-old baby brother. I inserted the image onto a home etched PCB by adding it to a screen shot of the traces before printing it onto transfer film. The final impression consists of black and white pixels made of toner-covered-copper or no copper (bare PCB substrate).
Thus, my children appear in Figure 18-24 of both the first and second editions of Intermediate Robot Building, with the publisher being none the wiser.
Similar to XSBoost, Carefree represents a combination of many parts that I had never tried before. Although some of the stuff wasn’t effective enough to reuse, there were a few surprising standouts that I included in other robots. In other words, sometimes it is a good idea to experimentally throw a bunch of parts into a single robot to see what works.