 |
|
CHIBOTS: |
|
Chicago Area
Robotics Group |

Left to right: Brian Smolik, David Cook, Terry Surma, Cliff Boerema, Steve Hassenplug,
Tom Gralewicz, and Paul Jurczak.
Not pictured: Jim Munro (behind camera), Eddy Wright (behind another camera),
Al Schilling, John Patrick, and Carlos Garcia.
LINE FOLLOWING CONTEST 2002
The Chicago Area Robotics Group held a robot line-following contest
on Sunday, February 10, 2002, 1:00 PM during the regular monthly meeting
at the Schaumburg Public Library.
As always, the meetings and events are open to the public.
All were welcome to watch or participate!
There was no cost to come and watch.
The cost of entering was $5 per robot for any non-member,
and free for all members.
No prior registration was necessary, in fact, many just showed up on race day.

TABLE OF CONTENTS
- Course Conditions and Acknowledgements
- Results
- Contestants
- Movies and Snapshots
- Robot Line Racing Rules

Course Conditions and Acknowledgements
The racetrack consisted of twenty 12″ × 12″ tiles made by Mike Bakula, Jim Munro, and Eddy Wright.
The pattern consisted of straight, straight, (start), straight, straight, right turn, straight,
right turn, straight, left turn, right turn, straight, (split mark) straight, right turn, left turn,
straight, right turn, right turn, straight, left turn, and right turn.
So, one lap equals ten straight and ten quarter-turns for a total of (10 x 12″ + 10 x (12 x pi / 4)) 214.25″.
That's approximately 544 centimeters.
Actually, the tiles are just less than 12″ square; so the real course length is probably around 532 cm, but who's counting?
Total three-lap race length is approximately 1632 cm.
To prevent slippage, The tiles were taped together with black masking tape.
The start and approximate halfway points were marked by red cones (drink cups) containing infrared
interrupter beams by David Cook.
The robot could be started anywhere on the straightaway before the start cones, with the
race timer beginning when the robot crossed the start line.
This “running start” prevented coordination issues and false starts.
A purple box contained a Motorola 68HC908GP32 MCU as a timer, with an LCD for output.
As the robot passed through the interrupter beams, the time was recorded for each partial (about halfway) and full lap,
up to three laps.
Pressing a button on the purple box or hitting return on a connected laptop (if desired) uploaded
the time data into the laptop.
John Orlando was the official timekeeper, running the purple box, with a manual stopwatch as a backup.
Scott Williamson posted the times onto a whiteboard (with markers supplied by Don Kerste).
Jim Munro accepted the contest coordinator lead role from Mike Bakula, who initiated the idea.
Jim kept the contest on the forefront of the group email list, dolled-out assignment requests,
called for prizes, and created the winning certificates.
Besides making some of the course tiles, Eddy Wright brought a still camera and video camera.
Without which, the event would probably have gone on significantly undocumented.
Paul Jurczak certified robots by placing them in a LEGO box (with a wee bit of room to spare).
He also provided sign-in sheets for robot / contestant information.
(So, you have him to thank for the detailed contestant information on this web page.)
Tom Gralewicz was a wonderful emcee and host.
Providing both play-by-play and color commentary, he presented a positive face to the event.
Rarely a dull moment, his call-ups kept an entertaining pace without ever denying an entrant
the time and number of attempts desired to feel given a fair shot.
At the risk of editorializing (too late), this was one of the most cooperative endeavors
I have ever encountered in a volunteer organization.
The group really pulled together, even if by accident, to produce a complete contest.
RESULTS
CONGRATULATIONS!!!
Congratulations to all of the mad scientists that entered robots.
The stunning fact that almost half of the robots (6 out of 14) were unable to complete the race is
a testament to how difficult it is to build a robust line-following robot.
Every person who had the courage to bring a robot to the contest should be proud
of that remarkable achievement.
To those who might be concerned about the viability or respectability of LEGO MindStorms robots,
take a look at first and third place.
| # |
Robot's Name |
Lap 1 Split |
Lap 1 Full |
Lap 2 Split |
Lap 2 Full |
Lap 3 Split |
Lap 3 Full |
Total Time |
Overall Speed |
| 1 |
LEGO Lighting |
3.30s |
7.36s |
3.21s |
7.22s |
3.36s |
7.54s |
22.13s |
73.8 cm/s |
| 2 |
Sandwich |
6.75s |
15.20s |
6.58s |
15.18s |
6.57s |
17.63s |
*48.02s |
34.0 cm/s |
| 3 |
LEGOR |
8.18s |
19.17s |
8.49s |
19.20s |
8.57s |
19.73s |
58.10s |
28.1 cm/s |
| 4 |
Wavy |
10.75s |
23.90s |
11.01s |
24.30s |
11.08s |
24.45s |
72.65s |
22.5 cm/s |
| 5 |
Beep |
12.06s |
26.58s |
12.40s |
27.15s |
12.35s |
26.95s |
80.69s |
20.2 cm/s |
| 6 |
Mad Hatter |
31.47s |
43.07s |
13.79s |
30.98s |
13.86s |
24.49s |
*98.55s |
16.6 cm/s |
| 7 |
Instant Bot |
13.94s |
34.74s |
14.00s |
38.38s |
13.94s |
30.77s |
*103.90s |
15.7 cm/s |
| 8 |
Mini |
14.01s |
42.45s |
14.61s |
32.20s |
15.17s |
33.09s |
*107.75s |
15.2 cm/s |
*Total does not include five-second penalty for nudge or running off course.
Honorable Mention:
Cheesy Little Ratbot
HRF-2002
BADlam
IT
Last Minute
Frustration: Month I
Best Dressed: Mad Hatter
My Robot Fried: Cheesy Little Ratbot
Best of Show: LEGO Lightning
CONTESTANTS
Appeared at Contest:

|
FIRST PLACE
BEST OF SHOW
Robot's Name: LEGO Lightning
Builder's Name: Steve Hassenplug
Line Sensors: 3 LEGO
Microcontroller: LEGO RCX
Programming Language: LegOS
Motors: 2 LEGO
Wheels: 3 LEGO
Speed: 73.8 cm/s
Batteries: 6 AA
Mass: 542 grams
|

|
SECOND PLACE
Robot's Name: Sandwich
Robot's Web Page: www.robotroom.com/Sandwich.html
Builder's Name: David Cook
Builder's Web Site: www.robotroom.com
Line Sensors: 4 photoresistors
Microcontroller: LM393 comparator
Motors: 2 Hsiang Neng gearmotor
Wheels: 2 LEGO
Speed: 26 cm/s stock, 34 cm/s on course
Batteries: 9 V alkaline
W x L x H: 21 cm x 15 cm x 6.5 cm
Mass: 340 grams
Notes: Schematics and building instructions appear in the book Robot Building for Beginners.
Sandwich's speed improved 30% over book stock by running with fresh alkaline 9 V battery and larger-diameter wheels.
|

|
THIRD PLACE
Robot's Name: LEGOR
Builder's Name: Paul Jurczak
Microcontroller: LEGO MindStorms RCX
Programming Language: NQC
Line Sensors: 3 LEGO light sensors
Motors: 4 old (mid-speed) LEGO motors
Wheels: tracks
Speed: 61 cm/s max, 30 cm/s avg, 28.1 cm/s on course
Batteries: 8 AAA NiMH
Mass: 588 grams
|

|
Robot's Name: Wavy
Builder's Name: David Cook
Builder's Web Site: www.robotroom.com
Line Sensors: 4 photoresistors
Microcontroller: LM2901 comparator
Motors: 2 Maxon gearmotors
Wheels: 2 LEGO
Speed: 22.5 cm/s
Batteries: 9 V alkaline
W x L x H: 17 cm x 8 cm x 6 cm
Mass: 286 grams
Notes: Early prototype for Sandwich robot. For contest, robot was run with stock 9 V battery and wheels, but speed can be doubled by using two 9 V batteries.
|

|
Robot's Name: Beep
Builder's Name: Al Schilling
Microcontroller: none
Line Sensors: 2 photoresistors (photocells)
Motors: 2 small gearmotors
Wheels: rubber, 2.5 diameter
Speed: 20.2 cm/s
Batteries: 4 AA
Mass: 494 grams
|

|
BEST DRESSED
Robot's Name: The Mad Hatter
Builder's Name: Terry Surma
Microcontroller: none
Line Sensors: IR
Motors: 2 RE510T
Wheels: 4″
Speed: 33 cm/s max, 16.6 cm/s on course
Batteries: 6 C cell
W x L x H: 21 cm x 24 cm x 16 cm (sans feather)
Mass: 1256 grams
Notes: IR LED detectors into an op amp driving relays to motors that are friction drive to wheels
|

|
Robot's Name: Instant Bot
Builder's Name: Tom Gralewicz
Microcontroller: LEGO RCX 2.0
Programming Language: LEGO MindStorms
Line Sensors: single LEGO
Motors: dual LEGO
Wheels: large narrow LEGO
Speed: 15.7 cm/s
Batteries: 6 AA
Mass: 524 grams
|

|
Robot's Name: Mini
Robot's Web Page: www.wrightbrothers.net/eddy/images/mini/
Builder's Name: Eddy Wright
Builder's Web Site: www.wrightbrothers.net/eddy/
Microcontroller: LM339 comparator
Line Sensors: OPB706A IR sensor
Motors: HobbyMotor
Wheels: LEGO
Speed: 20 cm/s, 15.2 cm/s on course
Batteries: 2 AA
Mass: 244 grams
|

|
Robot's Name: BADlam
Robot's Web Page: www.wrightbrothers.net/eddy/images/badlam/
Builder's Name: Eddy Wright
Builder's Web Site: www.wrightbrothers.net/eddy/
Microcontroller: OOPic II
Programming Language: OOPic BASIC
Line Sensors: phototransistor
Motors: R/C motors
Wheels: tank treads
Speed: 762 cm/s
Batteries: dual 9.6 V
Mass: 1800 grams
|

|
MY ROBOT FRIED
Robot's Name: Cheesy Little Ratbot
Builder's Name: Nick and Cliff Boerema
Microcontroller: paired SC head (BEAM)
Programming Language: *solder*
Line Sensors: photocells
Batteries: 3 AA
Mass: 278 grams
|

|
Robot's Name: IT
Builder's Name: Brian Smolik
Microcontroller: LEGO RCX
Programming Language: LEGO MindStorms
Line Sensors: 1 LEGO
Motors: 2 LEGO
Wheels: 2 LEGO
Speed: 25 cm/s
Batteries: 6 AA alkaline
Mass: 484 grams
|

|
Robot's Name: Last Minute
Builder's Name: John Patrick
Line Sensors: 5 Sharp 2L01
Microcontroller: 16F628
Programming Language: assembly
Motors: modified servos
Wheels: CDs
Batteries: 9 x 1300 mAh NiMH
|
|
Robot's Name: Frustration: Month I
Builder's Name: Carlos Garcia
Line Sensors: 2 Lynxmotion line-tracker kits, 3 IR each
Microcontroller: OOPIC II
Programming Language: OOPIC C
Motors: 6 x 6 V DC gearhead motors
Wheels: 6 “Sumo” deluxe tires
Speed: 61 cm/s
Batteries: 2 x 7.2 V NiMH
|
|
Robot's Name: HRF-2002
Builder's Name: Jim Munro
Builder's Web Site: home.xnet.com/~jimmn
Line Sensors: IR reflective sensor
Microcontroller: HandyBoard HC11
Programming Language: Interactive C
Motors: 2 Hsiang Neng gearmotor
Wheels: custom 3.75″ PVC w/vacuum cleaner belt treads
Speed: 40 cm/s
Batteries: CPU 8 AA rechargeable. Motor 10 AA alkaline
W x L x H: 20 cm x 23 cm x 28 cm
Mass: 2566 grams
Notes:
Will start with a buzzer tone.
Will display distance traveled on LCD screen.
Builder is a really nice guy.
|
Seen in Practice:

|
Robot's Name: Robot Bob
Builder's Name: Jim Munro
Builder's Web Site: home.xnet.com/~jimmn
Speed: less than 23 cm/s
|

|
Robot's Name: Dark Helmet
Builder's Name: Jim Munro
Builder's Web Site: home.xnet.com/~jimmn
Notes: A real crowd pleaser. Currently disassembled
|

|
Robot's Name: Sweet!
Robot's Web Page: www.robotroom.com/Sweet.html
Builder's Name: David Cook
Builder's Web Site: www.robotroom.com
W x L x H: 18 cm x 27 cm x 8 cm
Mass: 774 grams
Speed: 15 cm/s
Notes: Great cornering. Can stop automatically at the end of a course.
Was not entered into contest because of operator error. (Wrong dipswitch setting told processor
to reset the motherboard if LCD wasn't responding, but LCD was removed for racing.)
|
MOVIES AND SNAPSHOTS
Eddy Wright is hosting the movies and snapshots on his site.
www.wrightbrothers.net/eddy/video/
www.wrightbrothers.net/eddy/images/linefollow/
ROBOT LINE RACING RULES 0.3
by Mike Bakula
Important: All rules and event details were subject to change without notice.
Ultimately, the actual race differed in many ways from the rules below.
For example:
- One robot raced on the track at a time.
The time was then recorded and the fastest time at the end of the day was the winner.
There wasn't any single elimination / head-to-head racing.
- The penalty for restoring a wandering robot was 5 seconds, not 10 seconds.
Although the 1-foot penalty (if enforced) would have reduced in less of a time penalty than 5 seconds.
So, it averaged out.
None of the top three places were affected by this change.
- Multiple restarts were allowed.
This allowed everybody ample opportunity to get a good run.
These mutually agreed-upon (quiet consent) changes were announced before the start of racing.
They contributed to a positive, informal racing atmosphere.
Introduction
Here in the 21st century, home-built robots are becoming more capable and more common.
The Chicago Area Robotics Group is a group of hobbyists who gather to share information on robotics.
These rules have been developed by the society to provide an achievable challenge to new robot builders.
The following rules are intended to provide wide latitude in building line-following racers;
we hope you will take them in the spirit in which they are given,
and concentrate on building a sporting machine.
Robot Specifications
Robots must be autonomous.
(Data links to off-board computers allowed, but no teleoperation.
In other words, no human-operated remote controls.)
The maximum robot width is 8.500 inches (216 mm).
The maximum robot length is 11.00 inches (279 mm).
(That's a standard sheet of paper 81/2″ by 11″)
The robot must start the race in this orientation. So, one cannot angle the robot one way for qualification measuring
and then rotate the robot to a different orientation for starting the race.
There are no constraints on robot height.
There are no constraints on robot weight.
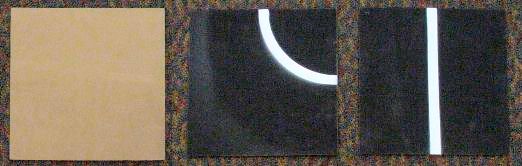
Track Specifications
The track surface is 12.00 inches (305 mm) wide, ± 1/8 in (3 mm).
The track surface is painted flat black (Krylon Ultra-flat Black).
The track surface is assembled from 12-inch (305 mm) squares of 1/8 in (3 mm)
hardboard (Masonite).
The track surface may have discontinuities, not to exceed 1/8 inch (3mm).
The course line is 0-3/4 inch (19 mm) wide, ± 1/8 inch (3 mm).
The course line is painted flat white (Krylon Flat White).
The course line may have discontinuities, not to exceed 1/8 inch (3mm).
The course line may be curved, with a centerline radius of 6 inches (152 mm).
The robot must deal with the lighting conditions as they appear.
That is, room lighting and window drapes will be set as desired by the judges
and won't be modified for individual contestants.
Also, flash photography and IR focusing cameras will be allowed, unless the judges deem such
activities as interfering with the ability to hold the event in general.

(Click the picture above of an unofficial example course to see a larger picture.)
Race Scoring
The Robot Line Racing contest is single-elimination ladder.
Races are run in matches of two machines, on separate tracks of equal length.
The faster-qualifying machine gets choice of track.
Each race is timed; the machine with the lower time wins the match.
If the track is open-ended, the time is to the end of the line.
If the track is a closed loop, the time is to the start/end line after the specified number of laps (usually three).
If neither machine finishes the course, the machine that successfully tracks the course line the longest distance wins the match.
A machine that has no part of its structure over the course line, or is clearly not steering in response to the course line, is no longer tracking
the course line.
An official may, at the request of the contestant, reset a machine that is no longer tracking the course line.
Resetting a machine incurs a 10-second (or 1-foot) penalty.
Decisions regarding whether a machine is tracking the course line are made only by a track official.
A match ends when both machines have completed the course, or each machine has been reset once and has lost track of the course line a second time.
Distance is measured as the number of tiles a machine has entered while tracking the course line.
Some races may offer time reductions for achieving secondary objectives (for example, lap-counting). These will be posted before the race.
Some races may use alternative elimination methods. These will be posted before the race.
Race Operations
Each machine gets one or more opportunities to “test drive” on the track for testing and calibration.
Test opportunities are first-come, first-served.
Each machine runs one qualification heat, timed. This qualification time determines their running order in the matches.
Machines are matched in a single-elimination ladder, similar to that used in NHRA drag racing.
Machines will receive an “on deck” call when the match before theirs is ready to run.
Machines should be ready to run when their mach is called. Machines have five minutes to make ready from the "on deck" call.
Matches are started by an official pressing a button on each machine.
Alternatively, matches may be started by an infrared signal if both machines
have the capability to detect infrared start signals.
Once a match has started, no contestant or official may touch the track or
interfere with the machines in any way except to reset a machine as stated
above.
More Information
Questions or comments about these rules should be directed to
Mike Bakula on the ChiBots group email list.
|