

The Chicago robots combine a Miller solar engine (such as on Appetizer) with a comparator-chip line-following circuit (such as on Sandwich). Because this type of robot is so small, I made two of them at the same time.
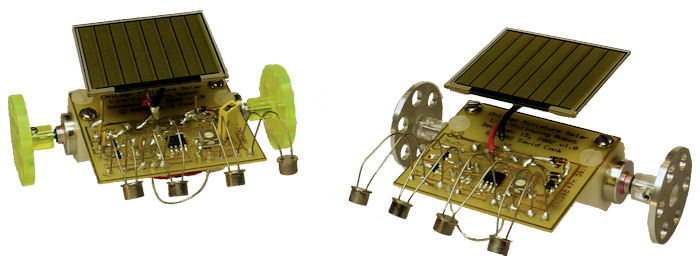
Chicago miniature solar line following robots.
(Chicago is no longer my smallest line-following robot. That honor now belongs to Monkey Mints.)
Other than the sensors and solar panel, the robot uses only surface mounted components. The circuit board is a single-sided home etched PCB.
The solar panel attaches to the circuit board with 22 AWG solid copper wire. This wire can be bent into the desired position and will stay in place, unlike thinner wire or stranded wire.
However, mounting the solar panel using only the power supply wires will stress the solar panel’s delicate solder points. To avoid breaking this critical connection, the insulated portion of the wire is adhered to the back of the solar panel with black hot glue.

Hot glue secures wires to solar panel.
Both copies of this robot feature the same wheel design, but each is made out of different material. One robot has wheels made from aluminum; the other robot has wheels made from yellow-green translucent acrylic.
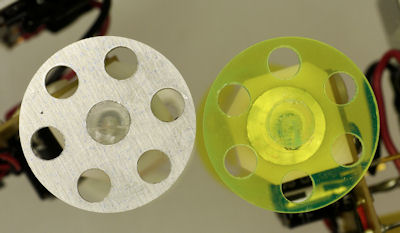
Aluminum and acrylic DIY robot wheels with speed holes.
The wheels have evenly spaced holes made on a rotary table on a milling machine. The process for making the wheels is documented in Chapter 5 of Intermediate Robot Building.
The downside of these wheels is that they tend to slip when sudden power is applied by the motors -- a common occurrence in a solar robot that goes through charge and discharge cycles. I wish that I had added a narrow outer groove so that rubber bands or rubber o-rings could have been added for grip.
The robot is rear-wheel drive and only has two wheels. So, the front of the robot slides on a half loop of bare wire. This works acceptably, but prevents the robot from being able to navigate a course that has even the smallest of gaps or cracks. Thus, the robot is limited to running on a track made from a single piece of material, such as a sheet of paper with a course drawn using a wide-tip black marker.
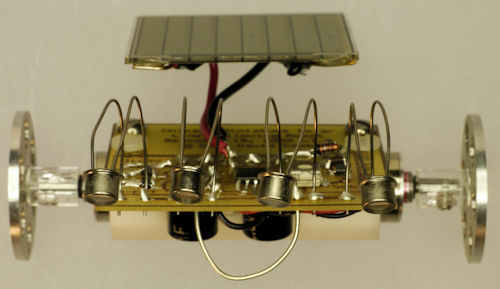
Encapsulated photosensors and front wire slide.
The line-following sensors are encapsulated cadmium-sulfide photoresistors. They are soldered to the top of the board, since the circuit board is only single sided.
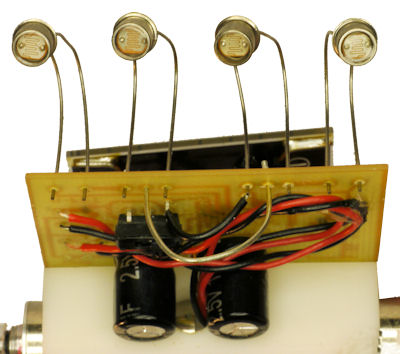
Photosensors front wire slide 1 farad capacitors and light dark line switch.
The solar panel charges a pair of 1 farad 2.5 WV supercapacitors. When a high enough voltage is reached, the Panasonic 1381 voltage detector turns on a transistor to supply power to the rest of the circuit. At that point, power dumps into the motors under the control of the Texas Instruments TLV3702 comparator chip. When the motors have sufficiently drained the capacitors, the voltage detector shuts off power and begins the charging cycle again.
Details about the robot’s motors and corrective surgery of the voltage trigger circuit can be found on the robot repair page. Since then, another motor has died, so only one robot works completely at this time.