

Wavy is a line-following robot that runs on a nine-volt battery and uses a comparator chip rather than a programmable microcontroller.

Overhead photograph of Wavy The Line Following Robot.
Wavy is the predecessor of Sandwich from Robot Building for Beginners. In fact, the circuitry is almost identical, except Wavy also had:
But, this is all judgment in hindsight. If I hadn’t tried various techniques, I wouldn’t have any basis to improve the circuitry for the next robot design.
Speaking of which, because Wavy is a unique initial design, it was hand wired on a generic breadboard, rather than a printed circuit board.

Point-to-point wiring on Wavy robot circuit board.
Although more rugged than a solderless breadboard, the wires can get snagged and are more prone to solder joint issues compared with a PCB. The process is also more time consuming, as each individual wire has to be individually stripped and soldered in a specific location.
One of the nicer elements of this robot is the battery holder. Unlike a flimsy loose battery snap, this enclosure grips the battery firmly.

Enclosed 9V battery holder.
From time to time, these types of holders come up for sale at salvage or surplus retailers. That’s where Wavy’s holder came from -- so there isn’t a current part number that I can post.
To align the tires and increase speed, LEGO idler gears transfer power from the parallel motors to the wheel shafts.

Partial gear fit.
Unfortunately, the single technic brick hole that holds the shaft is insufficient to keep the wheel straight as it is pushed away by the motor gear. Also, the gears don’t overlap as well as they could if a small spacer or washer was added.
Another LEGO piece makes an appearance underneath the rear of the robot’s base. It is attached using a small glob of epoxy.
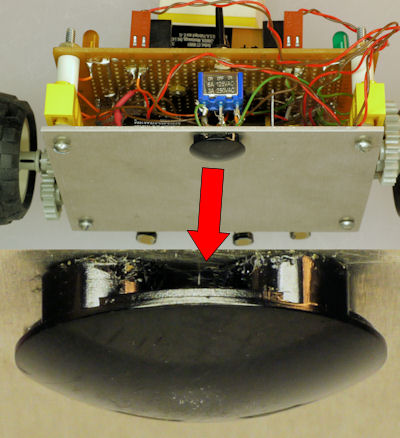
Rear of robot slides on a LEGO round plate boat stud.
It is easier for the robot slide on a rounded piece of plastic as opposed to the sharp edges of the screw heads or aluminum plate. Officially, I think the piece is called a “Plate, Round 2 x 2 with Rounded Bottom (Boat Stud)” in LEGO vernacular.
Unlike the sandwich container that gives Sandwich its name, Wavy lacks an external cover. As such, the four thick photosensors at the front of the robot are a little bent out of shape from storage and collisions.
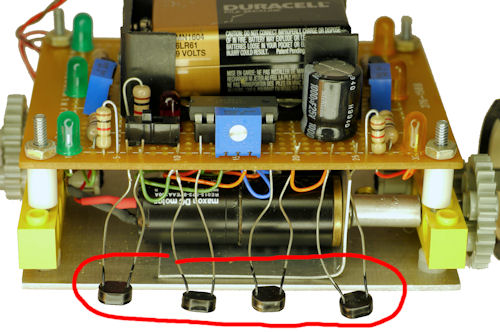
Thick unprotected photoresistor line sensors.
The odd angles and unevenness of the sensors negatively alters their brightness sensing relative to each other. Also, the lack of covering causes the sensors to be affected by ambient lighting and shadows. Both of these factors can affect line following ability. For that reason, Sandwich uses a covered body with white LEDs for even lighting and fix-mounted photosensors for relatively equal sensing.
Even so, there is enough variance between cadmium-sulfide photosensors that controlling the ambient lighting and crooked sensor leads is only half the problem. The robot still needs a potentiometer to adjust the resistance balance to roughly center over a line. With that tuning, Wavy can still successfully navigate a line at a decent pace even without the sensor and lighting improvements that Sandwich has.

Click above to see a low-quality movie of Wavy.
There is more information available about Wavy in Robot Building for Beginners. There is an overhead photo on Figure 6-17. The prototyping of Wavy’s folded motor brackets appears in Figures 24-1, 24-2, and 24-3, with the final result in Figure 26-20.
Some additional specifications appear on the original ChiBots page for the 2002 Line-Following Contest.
As a final note, Wavy is named not only for the robot’s motion, but was a nickname my mother used to call me when I was a toddler. She was a voice on MacSki and bought me my first computer. She passed away this year -- and is greatly missed.